But I need to transform form pixel index to physical position avoiding ITK templates and methods, I need to do that only with C basic data type. I saw the example and I am a bit confusing when I try to do the same in C.
Where everything is a vector/array with D components, except Identity and RotationMatrix that are a DxD Matrix. D being the image dimension.
In the code reference above m_IndexToPhysicalPoint is a matrix with value (Spacing * IdentityMatrix) * (RotationMatrix), the spacing (a D-vector) only influence the diagonal of the rotation matrix, think of it as a simple scaling transformation.
/** Direction type alias support. The Direction is a matrix of
* direction cosines that specify the direction in physical space
* between samples along each dimension. */
using DirectionType = Matrix< SpacePrecisionType, VImageDimension, VImageDimension >;
Thanks Brad, is s a vector there? wouldn’t the matrix shape of (D \dot s) be DIMx1?
I apply my own advice, and I should have better gone to the source, from the ITK Software guide:
Hmm… The diag function is common in Python numpy and Matlab, but I would a agree it is not rigorous. I have updated again with the values file in the matrix.
Thanks a lots @phcerdan and @blowekamp for the answers, so In C low level language programming it should be for 3D image the following Code If I didn’t make a mistake, With O(Origin), D(Direction), S(Spacing), I(index) and DxS(product between DxS):
It could be improved with vectors instead of variables, but I do not have much time, and I wanted to test if it works and thanks to let me know how to get it working.
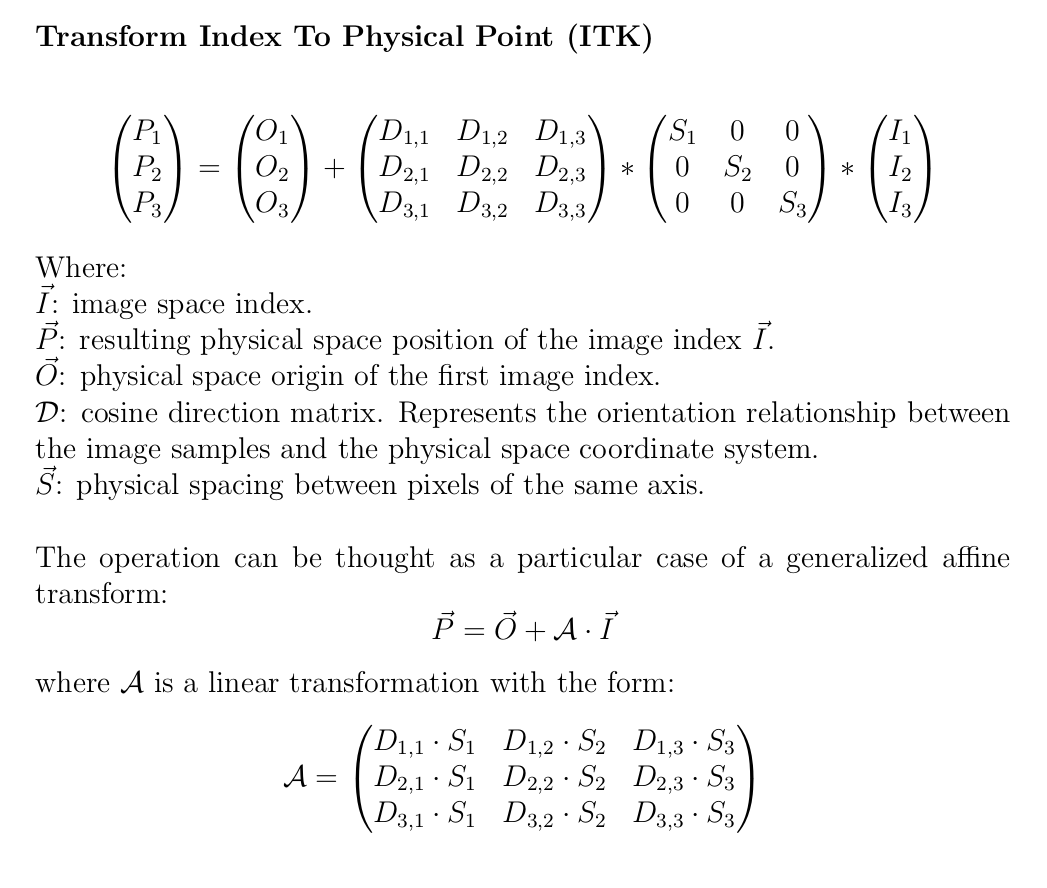
Pasting here a better formatted version of the transformation. I will contribute it to the ITK Software Guide to replace the non-standard math notation there. Hope is helpful!

} \ \mathbf{o} = \text{origin (Nx1)}\ \mathbf{s} = \text{spacing(Nx1)}\ \mathbf{i} = \text{index (Nx1)}\ \ IndexToPhysicalPoint(\mathbf{i})=\mathbf{o} +D \cdot \begin{pmatrix} s_{1} & \ & s_{2} & \ & & \ddots & \ & & & s_{n} \end{pmatrix} \cdot \mathbf{i}\")