Hey guys,I have a serious question about my python code.
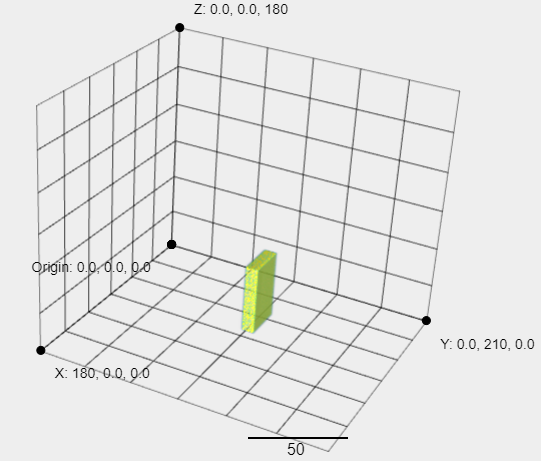
What I want to do is ,if I have a 3D array like this
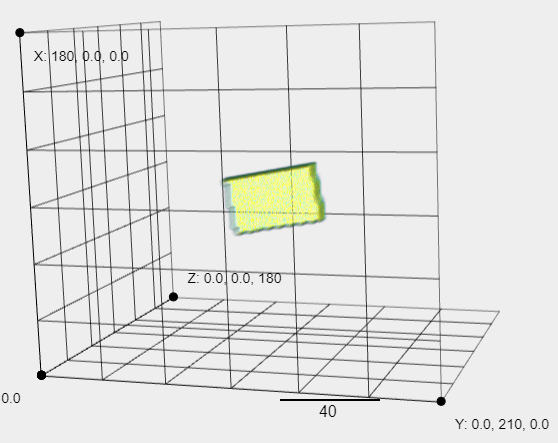
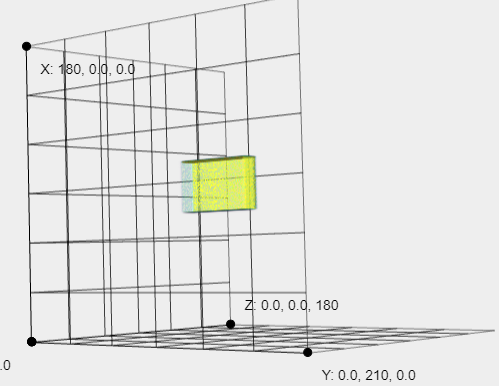
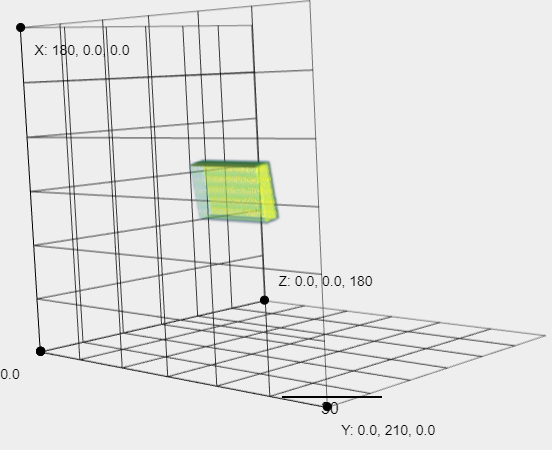
and I want it to be 90 degrees around the -X axis first,then 10 degrees around the y axis.
But it seems to wrap 90 degrees around the -X axis first, then 10 degrees around the z axis.
I don’t know why this is happening, it’s been bothering me for a long time, hope someone can tell me how.
The code below is what I wrote.
degrees1 = 90
rads1 = -(degrees1 )* math.pi / 180
degrees2 = 10
rads2 = -(degrees2 )* math.pi / 180
degrees = 0
rads = degrees * math.pi / 180
u=-1
v=0
w=0
S_mni1=np.array([[u**2+(v**2+w**2)*math.cos(rads1) , u*v*(1-math.cos(rads1))-w*math.sin(rads1) , u*w*(1-math.cos(rads1))+v*math.sin(rads1) , 0],
[u*v*(1-math.cos(rads1))+w*math.sin(rads1) , v**2+(u**2+w**2)*math.cos(rads1) , v*w*(1-math.cos(rads1))-u*math.sin(rads1) , 0],
[u*w*(1-math.cos(rads1))-v*math.sin(rads1) , v*w*(1-math.cos(rads1))+u*math.sin(rads1) , w**2+(u**2+v**2)*math.cos(rads1) , 0],
[0,0,0,1]])
u=0
v=1
w=0
S_mni2=np.array([[u**2+(v**2+w**2)*math.cos(rads2) , u*v*(1-math.cos(rads2))-w*math.sin(rads2) , u*w*(1-math.cos(rads2))+v*math.sin(rads2) , 0],
[u*v*(1-math.cos(rads2))+w*math.sin(rads2) , v**2+(u**2+w**2)*math.cos(rads2) , v*w*(1-math.cos(rads2))-u*math.sin(rads2) , 0],
[u*w*(1-math.cos(rads2))-v*math.sin(rads2) , v*w*(1-math.cos(rads2))+u*math.sin(rads2) , w**2+(u**2+v**2)*math.cos(rads2) , 0],
[0,0,0,1]])
S_mni=S_mni2.dot(S_mni1)
u=S_mni[0][2]
v=S_mni[1][2]
w=S_mni[2][2]
Trot=np.array([[u**2+(v**2+w**2)*math.cos(rads) , u*v*(1-math.cos(rads))-w*math.sin(rads) , u*w*(1-math.cos(rads))+v*math.sin(rads) , 0],
[u*v*(1-math.cos(rads))+w*math.sin(rads) , v**2+(u**2+w**2)*math.cos(rads) , v*w*(1-math.cos(rads))-u*math.sin(rads) , 0],
[u*w*(1-math.cos(rads))-v*math.sin(rads) , v*w*(1-math.cos(rads))+u*math.sin(rads) , w**2+(u**2+v**2)*math.cos(rads) , 0],
[0,0,0,1]])
Msvs=Trot.dot(S_mni)
vx_mni=np.zeros(size_img,dtype=float)
vx_mni[0:50,0:10,0:30]=1
x=40-1
y=120-1
z=90-1
sz_1=50
sz_2=10
sz_3=30
move=np.array([-math.floor(z-(sz_3/2))-1,-math.floor(y-(sz_2/2))-1,-math.floor(x-(sz_1/2))-1])
img_volume = vx_mni
itk_img_volume = itk.GetImageFromArray(img_volume)
TransformType = itk.AffineTransform[itk.D, 3]
affine_transform = TransformType.New()
params = itk.OptimizerParameters[itk.D](12)
params[0] = Msvs[0][0].item()
params[1] = Msvs[0][1].item()
params[2] = Msvs[0][2].item()
params[3] = Msvs[1][0].item()
params[4] = Msvs[1][1].item()
params[5] = Msvs[1][2].item()
params[6] = Msvs[2][0].item()
params[7] = Msvs[2][1].item()
params[8] = Msvs[2][2].item()
params[9] = move[0].item()
params[10] = move[1].item()
params[11] = move[2].item()
affine_transform.SetCenter((abs(move[0].item())+(sz_3/2),abs(move[1].item())+(sz_2/2),abs(move[2].item())+(sz_1/2)))
affine_transform.SetParameters(params)
Image3d = type(itk_img_volume)
resamplerType = itk.ResampleImageFilter[Image3d, Image3d]
resampleFilter = resamplerType.New()
interpolatorType = itk.LinearInterpolateImageFunction[Image3d, itk.D]
interpolator = interpolatorType.New()
resampleFilter.SetInput(itk_img_volume)
resampleFilter.SetTransform(affine_transform)
resampleFilter.SetInterpolator(interpolator)
resampleFilter.SetSize(itk_img_volume.GetLargestPossibleRegion().GetSize())
resampleFilter.SetOutputOrigin(itk_img_volume.GetOrigin())
resampleFilter.SetOutputSpacing(itk_img_volume.GetSpacing())
resampleFilter.Update()
movingImage = resampleFilter.GetOutput()