Hello! Sorry for asking again :’)
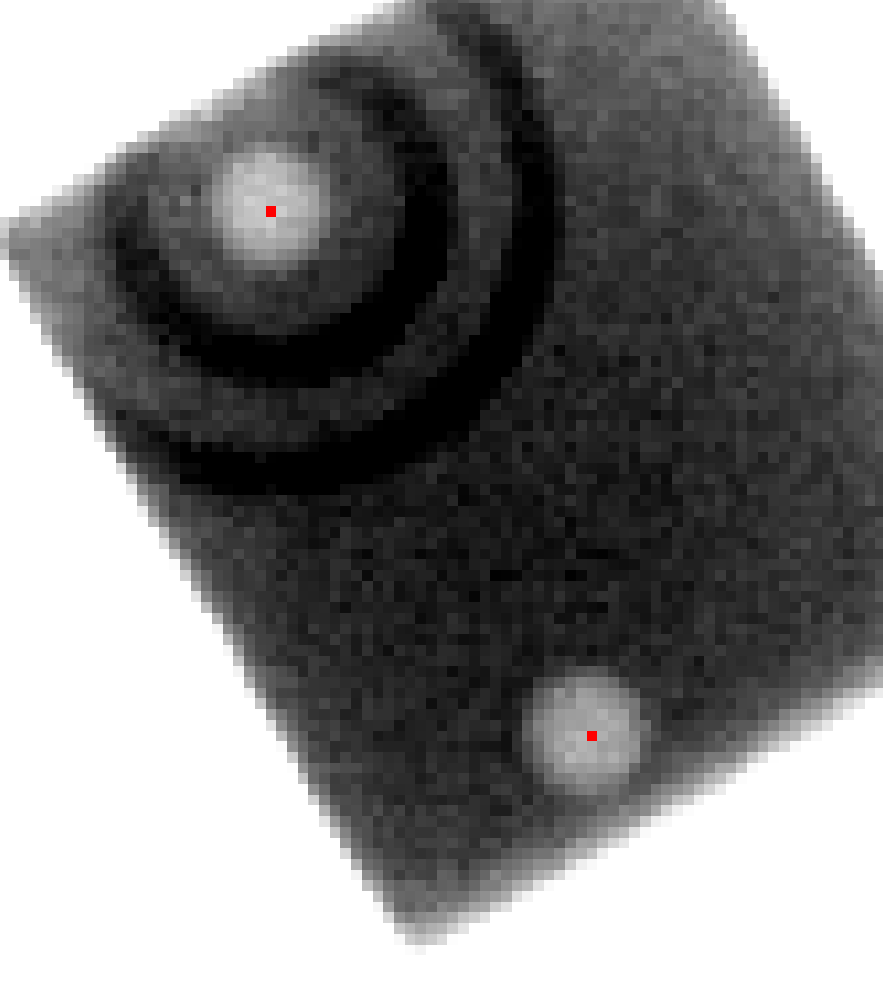
I basically have these two red points that identify the centres of the spheres (1st image).
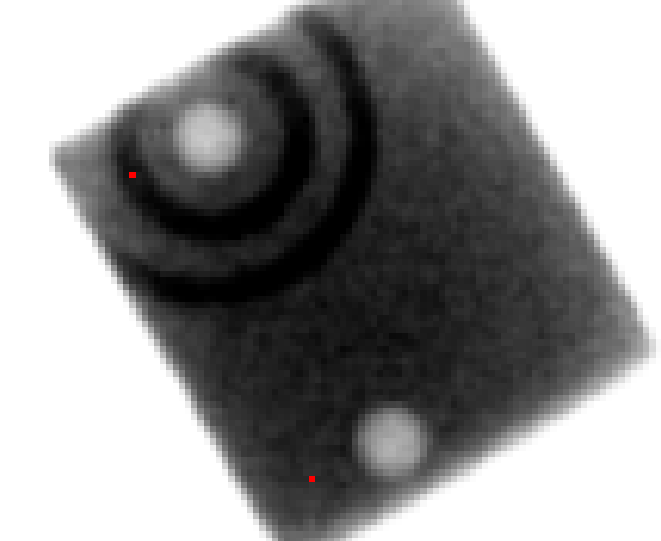
What I do then is to apply a registration (Euler2D) of the image on a reference one, getting the new image. What I want to do then is to place again the red points of the image before the registration on the new image. What I did was simply apply the transform.TransformPoint passing the coordinates of the two red points. After that in theory I should get the points of before placed in the same place at the centre of the two spheres but in the new registered image. The problem is that I get a different result (2nd image). What is the problem?
Be sure you are using homogeneous coordinates as input for your matrix, that means your point vector should have the form p = (px, py, 1)
If you believe your framework already takes care of this then try applying the inverted of the transform you got (just blindly guessing)
Hope it helps
1 Like
The point I put it in 2D, so it just has the coordinates (x, y) since also the registration is 2D ![]()
Try the inverse transform direction.
1 Like