I have been trying to rotate an image that has quaterion coordinates and is in an oblique reference frame, but I am not entirely sure how this is done. When I apply the same rotations (two rotations about the x and y axes) to a non-oblique image, it ends up in the proper orientation. However, when trying with the image with the quaterion rotations, it ends up slightly off tilt (almost like a picture off center in a picture frame). The images in question are 3D images and I have been trying both the VersorTransform and the Eurler3DTransform for the rotations, but with no success with the oblique images.
Welcome to the community Geoff!
Some screenshots would be helpful to understand your problem.
1 Like
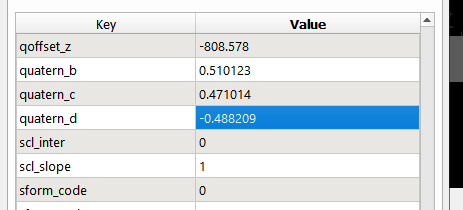
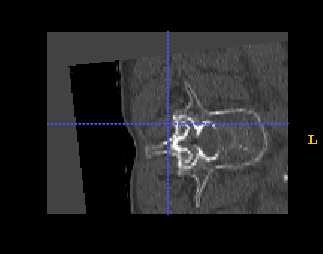
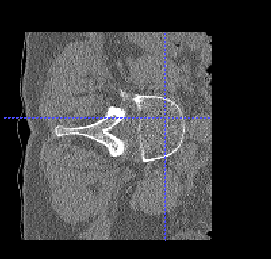
Sure thing. Here is the snippet of code that I am using. Essentially I am rotating in two axis, and I have confirmed this does work when the images are not in an oblique view. The images are starting in ASL orientation and I am rotating them into SLA orientation. Below are the images with the quaternion values taken all screen shot from ITK-Snap. The left image is the one with the quaterion angles and the right is the one that worked properly.
euler = sitk.Euler3DTransform()
euler.SetComputeZYX(True)
a = np.array([[1., 0, 0],
[0, 0, 1.],
[0, -1., 0]])
b = np.array([[0, 1., 0],
[-1., 0, 0],
[0, 0, 1.]])
c = np.matmul(b, a)
euler.SetMatrix(tuple(c.flatten()))
euler.SetCenter(img_resampled.GetOrigin())
old_direction = np.array(img.GetDirection()).reshape(3, 3)
new_direction = np.matmul(c, old_direction)
image_shape = img.GetSize()
resample = sitk.ResampleImageFilter()
resample.SetReferenceImage(img)
resample.SetSize([image_shape[2], image_shape[0], image_shape[1]])
resample.SetOutputDirection(tuple(new_direction.flatten()))
resample.SetInterpolator(sitk.sitkLinear)
resample.SetTransform(euler)
img_resampled = resample.Execute(img)