I’m using the Similarity3DTransform for quite some time now, but I always find certain configurations where it totally fails to register two images. Usually with some manual pre-alignment it is then no problem.
I found that the registration falls into a local minimum, especially when the two images are rotated relative to each other.
I register binary masks, and here is a minimal working example which demonstrates the problem:
import SimpleITK as sitk
import numpy as np
fixed_ar = np.zeros([100, 100, 100], dtype=np.uint8)
fixed_ar[20:40,20:80,20:80] = 1
fixed_ar[40:60,40:60,40:60] = 1
fixed = sitk.GetImageFromArray(fixed_ar)
moving_ar = np.rot90(fixed_ar, k=2)
moving = sitk.GetImageFromArray(moving_ar)
sitk.WriteImage(fixed, 'fixed.mhd')
sitk.WriteImage(moving, 'moving.mhd')
init = sitk.CenteredTransformInitializer(fixed, moving, sitk.Similarity3DTransform())
R = sitk.ImageRegistrationMethod()
R.SetMetricAsMeanSquares()
R.SetMetricSamplingStrategy(R.RANDOM)
R.SetMetricSamplingPercentage(0.2)
R.SetOptimizerAsGradientDescent(learningRate=1.0, numberOfIterations=1000, convergenceMinimumValue=1e-6, convergenceWindowSize=10)
R.SetOptimizerScalesFromPhysicalShift()
R.SetInterpolator(sitk.sitkLinear)
R.SetInitialTransform(init)
R.AddCommand(sitk.sitkIterationEvent, lambda: print(R.GetOptimizerIteration(), R.GetMetricValue(), R.GetOptimizerLearningRate()))
tx = R.Execute(sitk.SignedMaurerDistanceMap(fixed), sitk.SignedMaurerDistanceMap(moving))
tx = tx.Downcast()
print()
print("Scaling", tx.GetScale())
print("Translation", tx.GetTranslation())
print("Rotation", tx.GetVersor())
resample = sitk.ResampleImageFilter()
resample.SetReferenceImage(moving)
resample.SetInterpolator(sitk.sitkNearestNeighbor)
resample.SetTransform(tx)
img = resample.Execute(moving)
sitk.WriteImage(img, 'out.mhd')
using SimpleITK 2.0.
I have this shape rotated 180° around. However, the result found here is simply to move the moving image into the other along the z-axis and overlay the larger boxes.
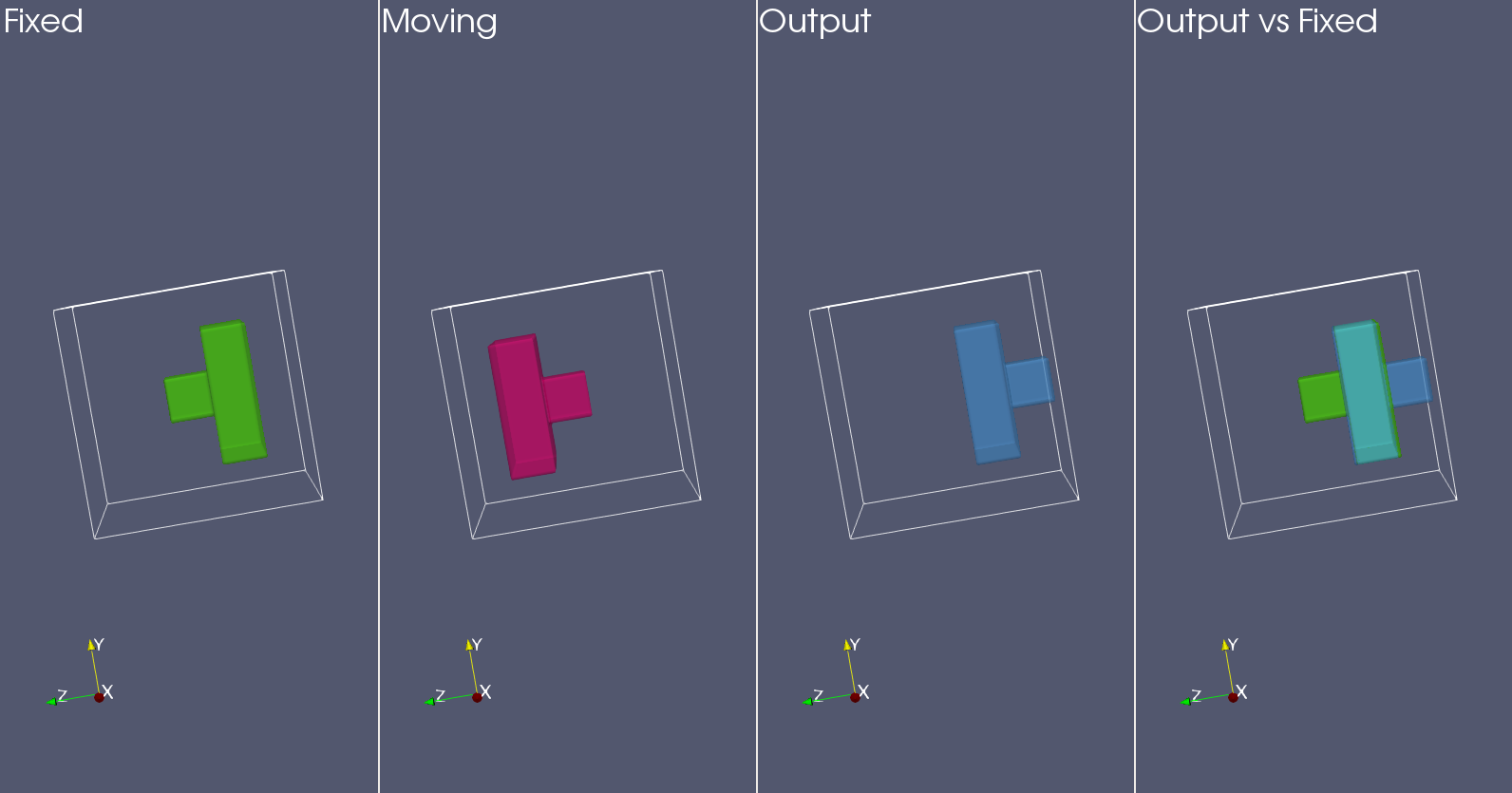
I have to admit, that this example exaggerates the issue a bit, however I had here two images where they were approximately 40 to 180° rotated and the result was that the moving image was scaled down and put into the other one.
I wonder if this is a common issue and images should be aligned sufficiently good beforehand or if there is anything I can do here.
I played around with weighting the parameters of the Transformation using R.SetOptimizerWeights, but that would not give a good solution either. Also using different metrics, sampling methods or opimiziers would not give a different result.
 . What you are experiencing is a feature not a bug, as a robust registration depends on robust initialization.
. What you are experiencing is a feature not a bug, as a robust registration depends on robust initialization.