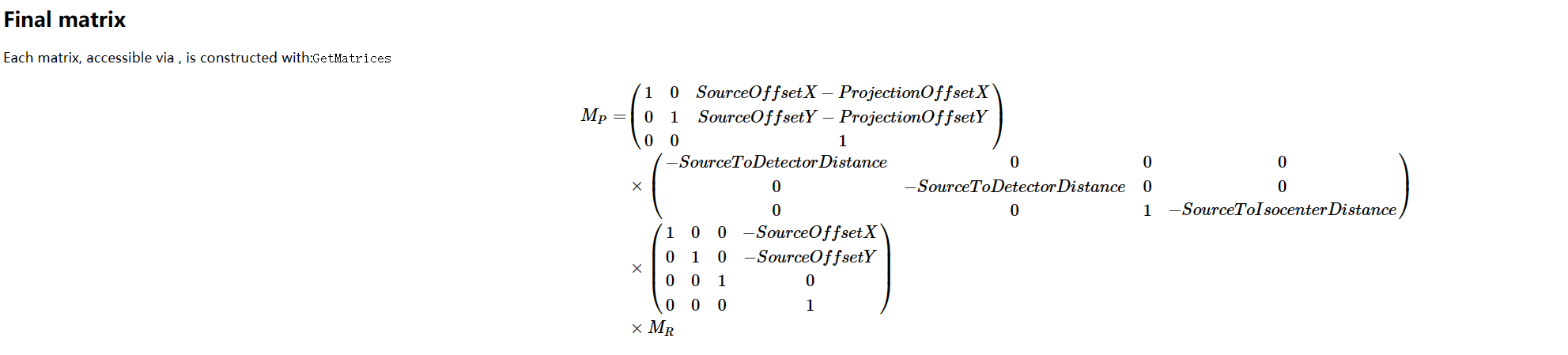
Not more than that. The matrices are in homogeneous coordinates. MR is a rotation matrix. The two matrices with offsets are translation matrices. The matrix with diagonal elements is a projection matrix which is essentially the application of the Thales theorem.
1 Like