transform = sitk.Euler3DTransform(center ,0.5,0,0,(100,0,0))
image_resampled = sitk.Resample(moving_image, transform)
My image is private and can’t be released, my image is 3D.
transform = sitk.Euler3DTransform(center ,0.5,0,0,(100,0,0))
image_resampled = sitk.Resample(moving_image, transform)
My image is private and can’t be released, my image is 3D.
I would suggest padding the image (start with a sitk.ConstantPad) to add 0 values around your image.
You should define the size of the padding you need. Then, after rotation, you should not lose any information.
Such as: padded = sitk.ConstantPad(image, (20, 50, 1), (50, 100, 1), 5000)
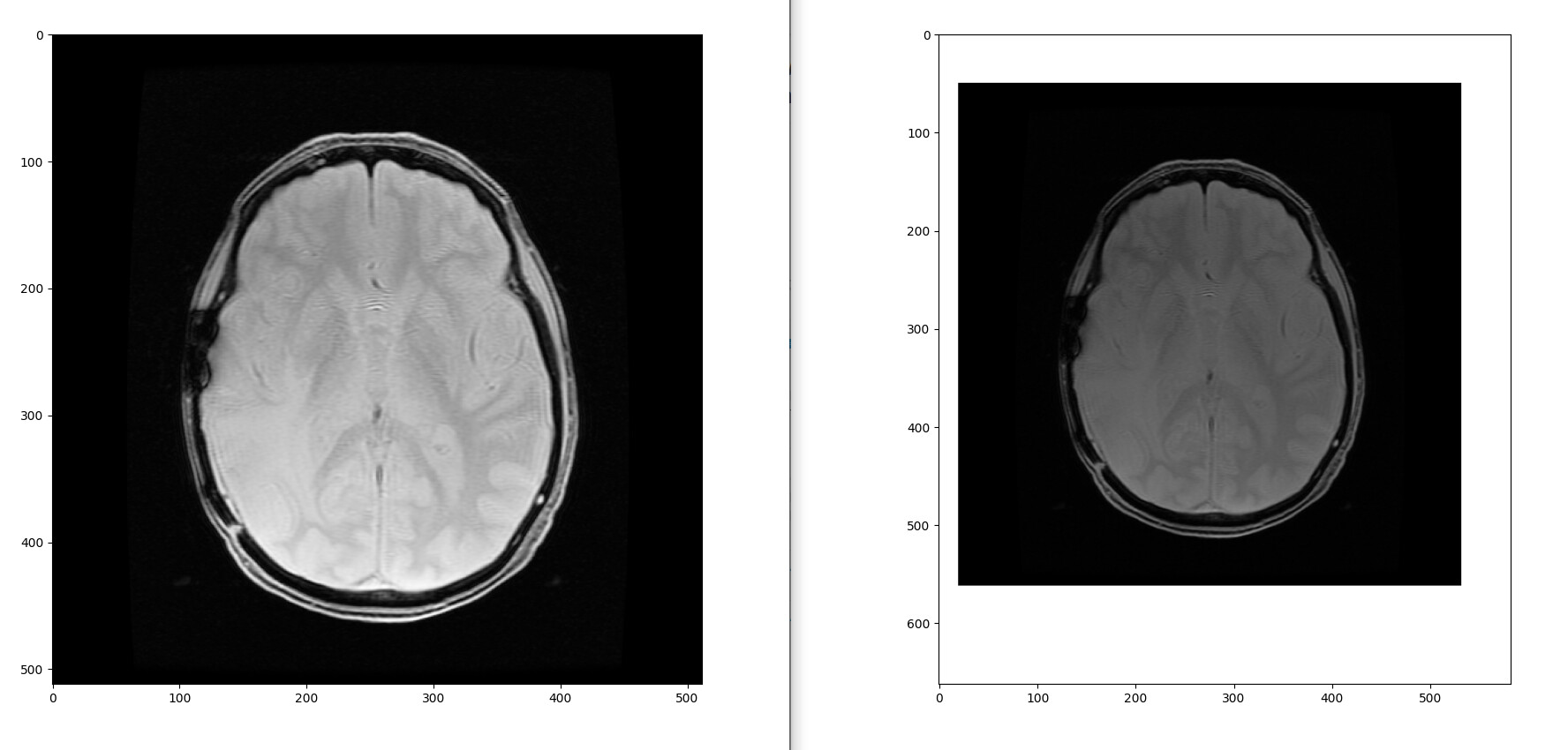
Original image (left) and padded image (right)
In this case, padded will contain the same image with 50 additional rows at the top, 100 additional lines at the bottom, 20 additional columns at the left and 50 additional columns at the right of the image.
All the new lines and columns are filled with the value 5000 but you can fill it with 0 if you prefer.
See ITK padding example: https://examples.itk.org/src/filtering/imagegrid/padanimagewithaconstant/documentation
See the SimpleITK ConstantPaddingFilter documentation : https://simpleitk.org/doxygen/latest/html/classitk_1_1simple_1_1ConstantPadImageFilter.html